TB6600 STEP Motor Sürücü
TB6600 Step Motor Sürücüsü, iki fazlı step motoru kontrol edebilen kullanımı kolay profesyonel step motor sürücüsüdür. Mirodenetleyicisi veya herhangi 5V dijital pulse sinyali verebilen cihazlar ile kontrol edilebilmektedir. TB6600 Step Motor Sürücüsü kademeli olarak akımı ayarlanabilen motor sürücüsüdür. Geniş besleme aralığına sahiptir(9 ~ 42VDC). Step motorların çoğu için yeterli olan 4A pik akımı üretebilir. Sorunsuz ve profesyonel bir şekilde motor kontrolü yapılması gerektiren uygulamaların tamamında kullanılabilir. DC Motor sürücülerden farklı yapısı, motor bağlantısının nasıl yapılacağına dair bilgileri üzerinde bulunduran kendi kasasıyla kullanıma hazır olarak satışa sunulmaktadır.
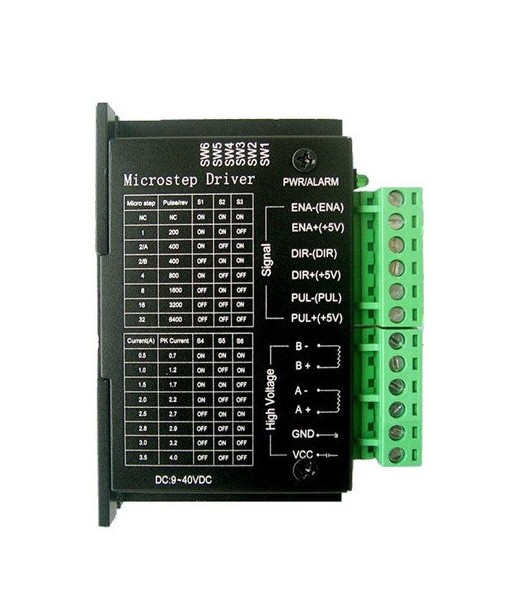
TB6600 Step Motor Driver Datasheet

- 8 çeşit akım kontrolünü destekler
- Desteklenen 7 çeşit mikro adım ayarlanabilir
- Arayüz, yüksek hızlı optokuplör yalıtımı uygular
- Isıyı azaltmak için otomatik yarı akış
- Geniş alan ısı emici
- Anti-yüksek frekans girişim yeteneği
- Giriş anti-ters koruma
- Aşırı ısınma, aşırı akım ve kısa devre koruması
- Giriş Akımı: 0,5A
- Çıkış Akımı: 0,5 ~ 4.0a
- Güç (MAX): 160W
- Mikro Basamak: 1, 2 / A, 2 / B, 4, 8, 16, 32
- Sıcaklık: -10 ~ 45 ?
- Nem: Yoğunlaşma yok
- Ağırlık: 0,2 kg
- Boyut: 96 * 71 * 37 mm
Arduino ile TB6600 Step Motor Sürücüsü Kontrolü
- Aşağıdaki kod ile yapılacak uygulamada bipolar step motor kontrol edilecektir.
- Kontrol edilecek step motor 1,8 adım açısına sahip, 1.7A akım çeken bipolar step motordur.
- Buna göre TB6600 Step Motor Sürücüsünü 1.7A akım çıkışını ayarlayalım.
- Micro Step adımını da 32 olarak set ettikten sonra
- Güç kaynağından cihazı besleyelim.
Up: OFF; Down: “ON” Olarak ayarlamayı unutmayınız.
int PUL=7; //define Pulse pin int DIR=6; //define Direction pin int ENA=5; //define Enable Pin void setup() { pinMode (PUL, OUTPUT); pinMode (DIR, OUTPUT); pinMode (ENA, OUTPUT); } void loop() { for (int i=0; i<6400; i++) //Forward 5000 steps { digitalWrite(DIR,LOW); digitalWrite(ENA,HIGH); digitalWrite(PUL,HIGH); delayMicroseconds(50); digitalWrite(PUL,LOW); delayMicroseconds(50); } for (int i=0; i<6400; i++) //Backward 5000 steps { digitalWrite(DIR,HIGH); digitalWrite(ENA,HIGH); digitalWrite(PUL,HIGH); delayMicroseconds(50); digitalWrite(PUL,LOW); delayMicroseconds(50); } }
